Zoals hier te lezen is heb ik in het verleden al een eigen cameratrein gemaakt. Na een aantal jaar gebruik zijn er een aantal verbeterpunten/upgrades die gemaakt kunnen worden.
Over het algemeen ben ik nog steeds zeer tevreden met de cameratrein. De enige “probleempjes” zijn als volgt
- De flatcable tussen de Raspberrypi en de camera moet nu een kwartslag gedraaid worden, hierdoor is deze beschadigd en geeft soms geen of slecht beeld.
- Draadloos ontvangst op beurzen is niet ideaal i.v.m. externe storingsbronnen en doordat de Pi naast de metale powerbank zit.
- Hoewel de accu lang mee gaat (ongeveer 6 uur) kan ik tijdens het laden niet rijden, Soms wordt het opladen ook vergeten😅
- Dit is niet zo zeer een probeem maar de nieuwe Raspberry pi zero 2 W is uit. deze heeft meer rekenkracht waardoor hogere bitrates mogelijk worden. En het is een goed excuus om met hardware te spelen😊
In het nieuwe ontwerp is het belangrijk dat de flatcable niet meer kan beschadigen door het wisselen/laden van de accu. daarom is het belangrijk dat er rekening gehouden wordt met de route van de kabel. in de eerste camerawagon was hier geen rekening mee gehouden.
Ook wil ik de accu makkelijker verwisselbaar maken. Ik heb van een vriend 8 powerbanks gekregen welke ik wil gaan gebruiken voor deze camera.
Gezien de storing die vaak aanwezig is op de 2.4Ghz wifi wil ik de optie houden om een 5Ghz wifi adapter te plaatsen.
Met al het bovenstaande in gedachten ben ik Fusion360 in gedoken om een ontwerp te maken. Mijn eerste gedachte was om weer iets te maken dat op een bestaande wagon geplaats moet worden maar dan ben ik beperkt tot de afmetingen van een wagon die ik heb of moet kopen
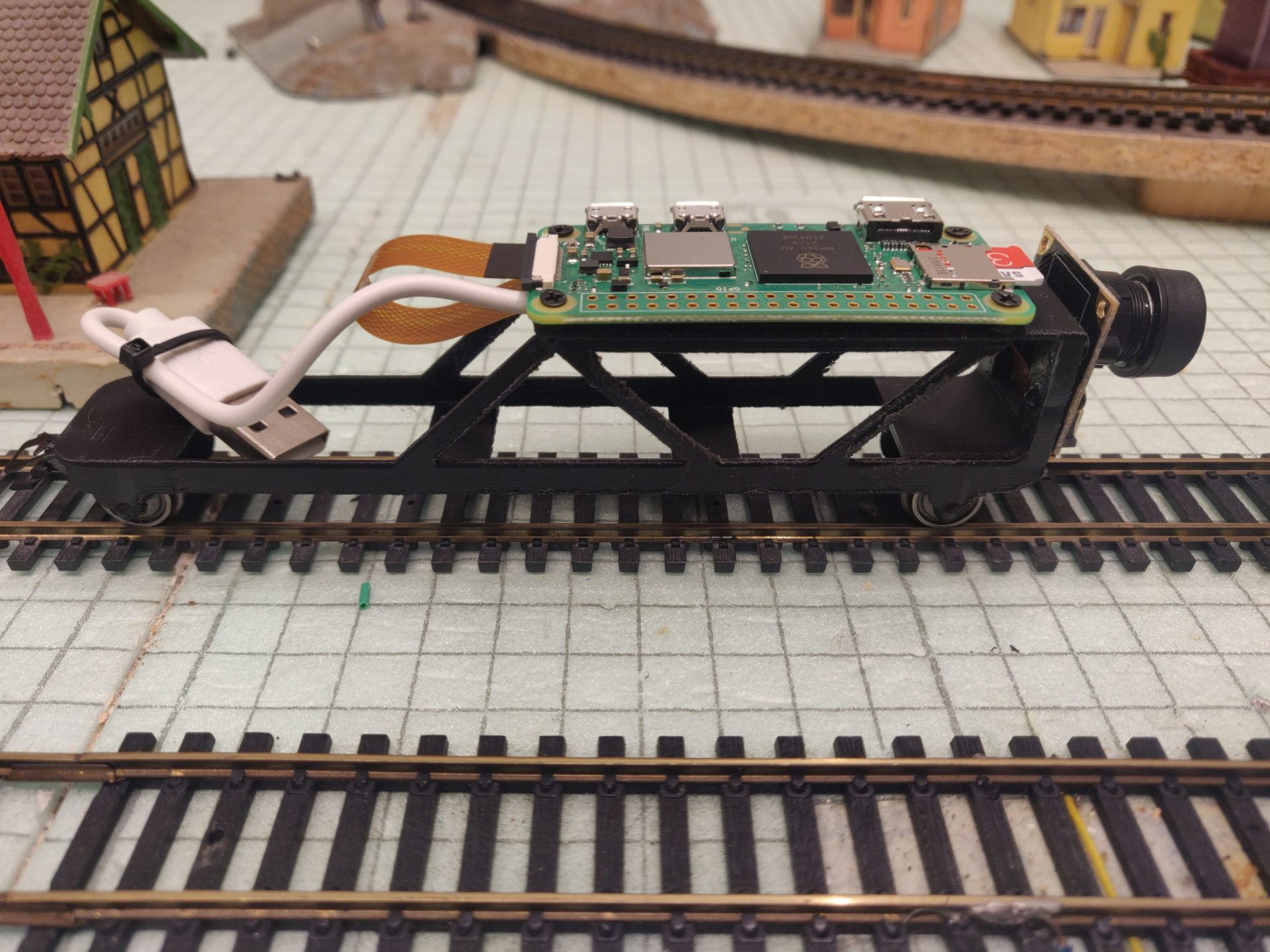
Daarom heb ik besloten om de gehele wagon te ontwerpen en te printen (behalve de wielen). hierdoor kon ik de powerbank lager plaatsen. dit zorgt er voor dat de hoogte van de camerawagon geen probleem oplevert met bovenleiding. Na een middag ontwerpen en het de volgende dag controleren van het ontwerp kwam ik op het onderstaande ontwerp uit.


Zoals te zien is heb ik er voor gekozen om de pi dit keer bovenop te plaatsen. hierdoor kan de flatcable netjes direct naar de camera zonder gedraaid te hoeven worden, uiteraard moet deze wel gebogen worden maar dat is geen probleem zolang dit niet te vaak gebeurd. En aangezien het wisselen van de accu hier niets met de pi of de flatcable doet is dat geen probleem
Een ander ding dat ik deze keer anders doe is de manier van bevestigen van de camera en de pi, voorheen was dit los in de behuizing gedrukt, Nu heb ik threaded inserts voor 3d printing gebruikt deze drukt je met de hitte van je soldeerbout in een vooraf ontworpen gat zodat je hier in kunt schroeven.
Na een aantal uutjes wachten was de printer klaar en kon ik beginnen met het monteren van alle onderdelen. Achterop de pi zitten pads voor het solderen van de 5V power deze heb ik gebruikt voor de afgeknipte usb kabel. Dit was het enige soldeer werk dat voor nu nodig is. later als ik een usb wifi adapter wil toevoegen zal ik deze ook moeten solder achterop de pi omdat de usb poort aan de zijkant niet gebruikt kan worden tijdens het rijden, dit steekt dan te ver uit.





Nu alle hardware klaar staat moet de software nog, gelukkig is de pi zero w 2 volledig compatible met de pi zero W, Dit betekend dat ik de SD-kaart van de eerste camerawagon kan clonen naar een 2e SD-kaart en die kan gebruiken in de nieuwe camerawagon.
De eerste beelden van de camera staan hieronder. Ik heb hier gekozen voor een camera met een grotere FOV welke helaas geen infrarood filter heeft, hierdoor zul je soms gekke kleuren zien of de IR leds in de baan. Helaas is door youtube compressie de kwaliteit niet het zelfde als de ruwe video bestanden maar het geeft een indruk van het beeld.
Voor nu laat ik het even zo, later kan ik nog kijken om deze camera ook te vermommen zodat hij minder opvalt op de baan. maar voordat ik dat doe wil ik eerst goed kunnen testen op een beurs.